
案例介绍
★国家自然科学基金,电动并联轮足复合式机器人(北理哪吒)总体设计与运动控制 2016.9--至今
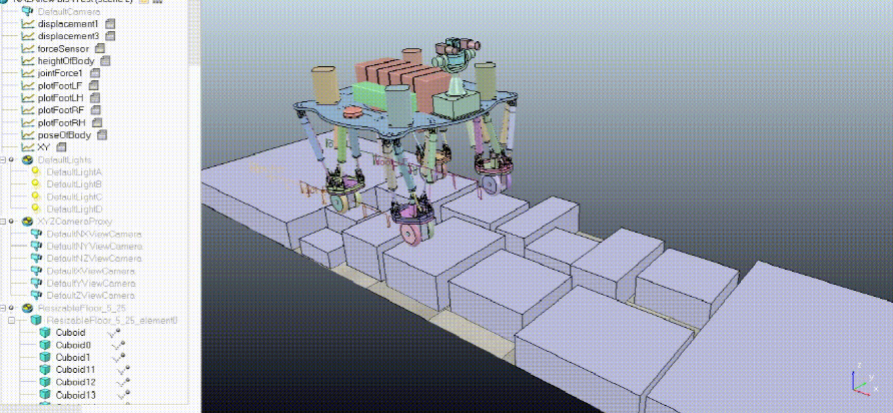
项目角色:核心骨干成员。课题设计了一种新型电动并联式轮足机器人,具有大负载、全方位、全地形自主通过能力。机器人腿部采用并联结构,足端安装驱动轮,可实现轮足复合式运动。本人与团队成员参加了2017年全国大学生“挑战杯”科技竞赛并获得一等奖,且凭此项目获得了2017年度工信创新奖学金一等奖,2017年与导师共同撰写国家自然科学基金《Stewart型轮足式机器人驱动控制方法研究》面上项目获批64万元科研经费,在2018年凭此项目申请了研究生科技创新重点项目获批了12万元科研经费。本人在项目中所负责的工作有:
完成机器人ROS环境总体控制系统设计;
设计VREP与Matlab、ROS仿真系统搭建;
基于启发式搜索的已知地图落足点足式运动规;
基于激光雷达点云的避障与轨迹优化; 设计机器人总体运动控制算法;
设计基于动力学的模型预测控制算法;
设计可变构型轮足端轨迹优化算法。
基于自适应阻抗的轮式隔振控制。
案例图片

相似案例推荐
其他人才的相似案例推荐
-

页面调整,短视频app
美术功底,让界面更好地服务用户。全心全意为用户服务。让我们为
-

短视频app,网页调整
美术功底,将ui界面设计更贴近人性。很好地完成了项目,我能力
-

手机端页面样式调整
负责前端页面,有美术功底。能力强,能够很好地完成任务。会H5
-

JimuGo
Jimugo主要是用来控制Jimugo智能机器人的APP,包
-

某RPA机器人自动化流程测试项目
主要完成基于RPA机器人自动化流程平台的功能测试,制定测试计
-

分选机器人
基于产线垃圾,对产线垃圾进行标注后的数据清洗,模型训练,修改
-

基于自然语言处理的情感分析
在项目中负责编写python代码,对TEXTCNN模型进行超
-

作品集
1.开放平台网站&SaaS后台页面设计,并给出设计规
-

作品集2
云医馆移动端&PC端界面设计、运营banner及h5
-

某国月度年休假预提
项目名称:某国月度年休假预提RPA 项目背景:某个企业
-

管网溯源小程序
主要用于黄江镇的环境监测、利用专业仪器测量上报数据、在小程序
-

管网溯源小程序
主要用于黄江镇的环境监测、利用各种精密的仪器进行监测、测量的
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

