
案例介绍
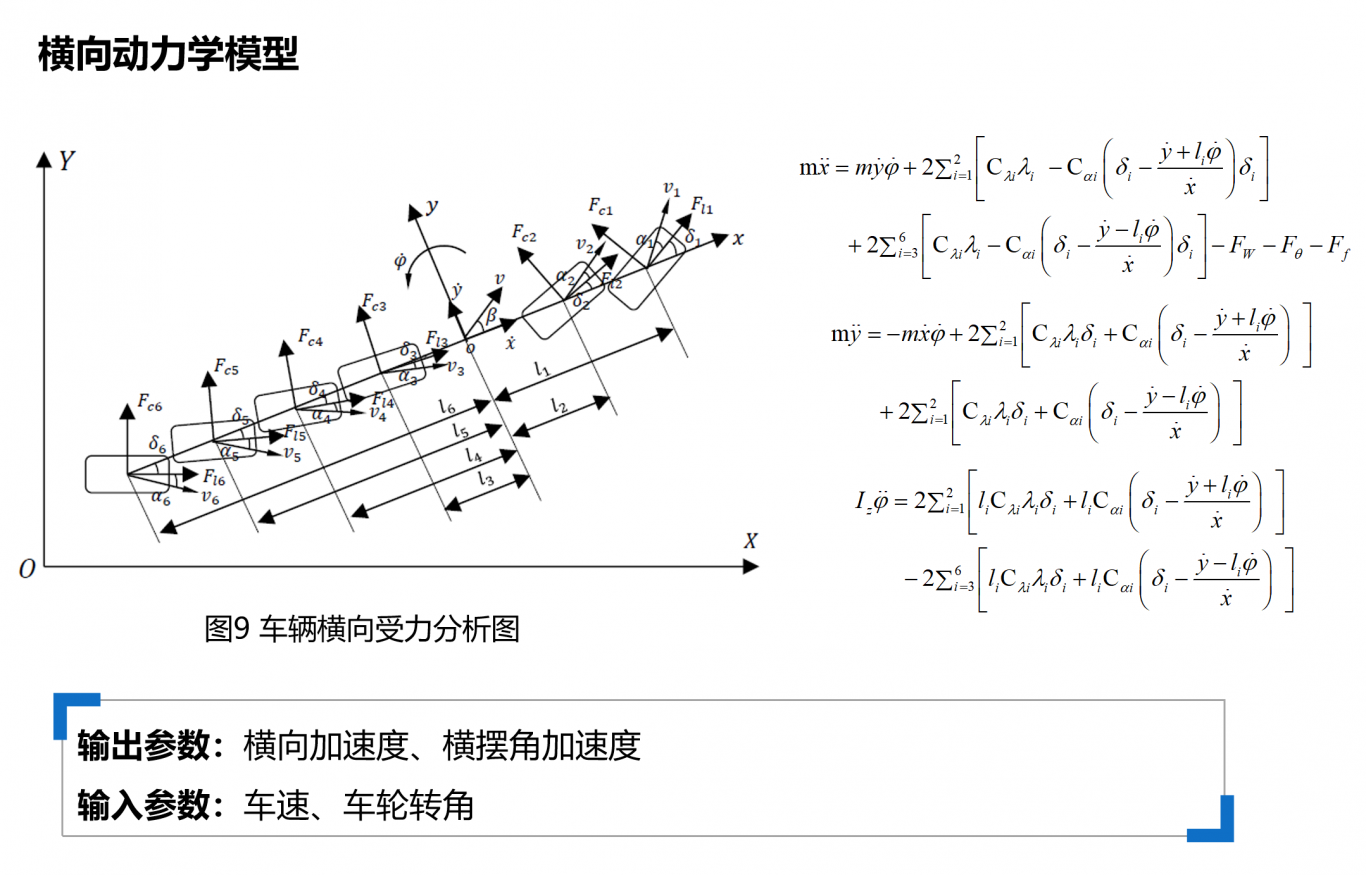
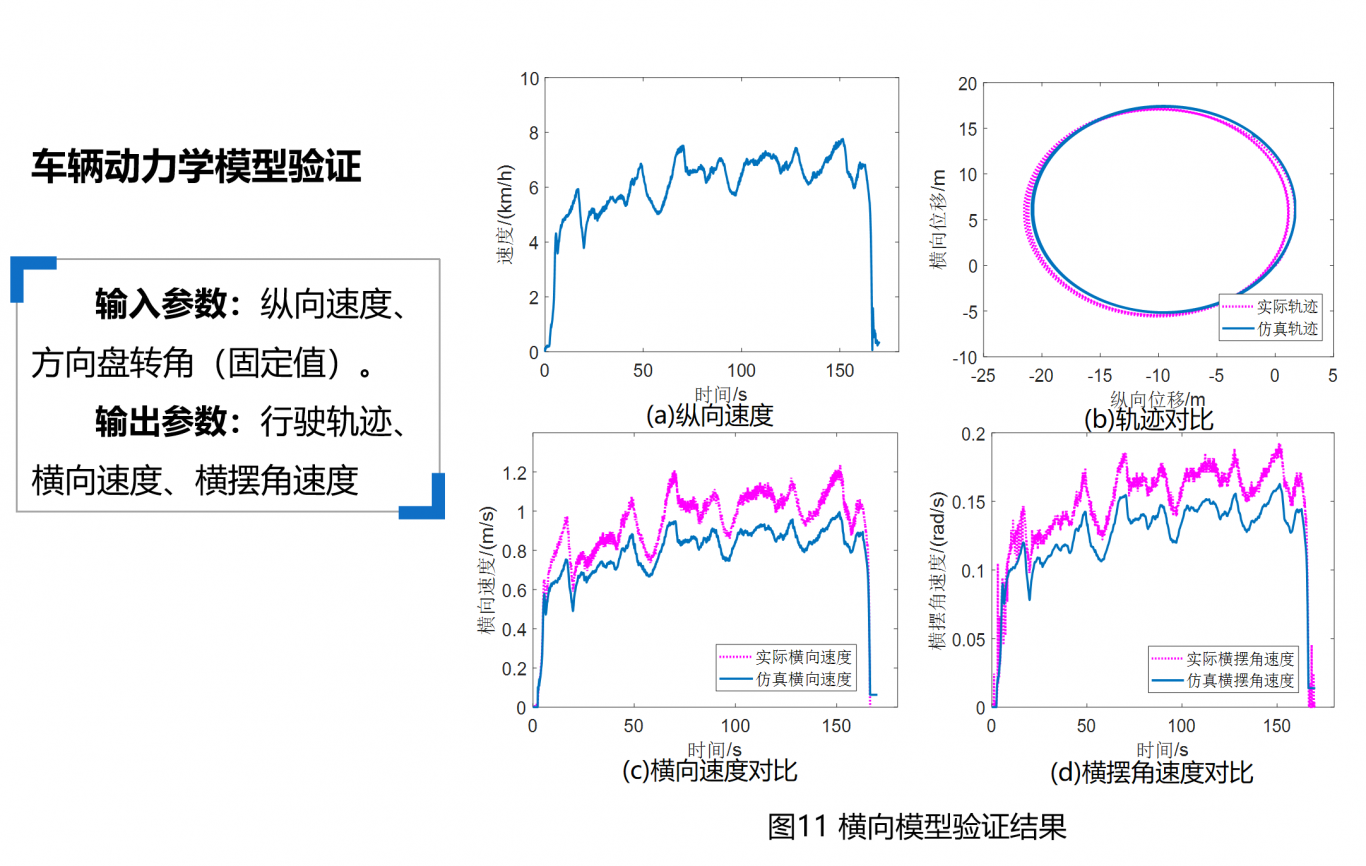
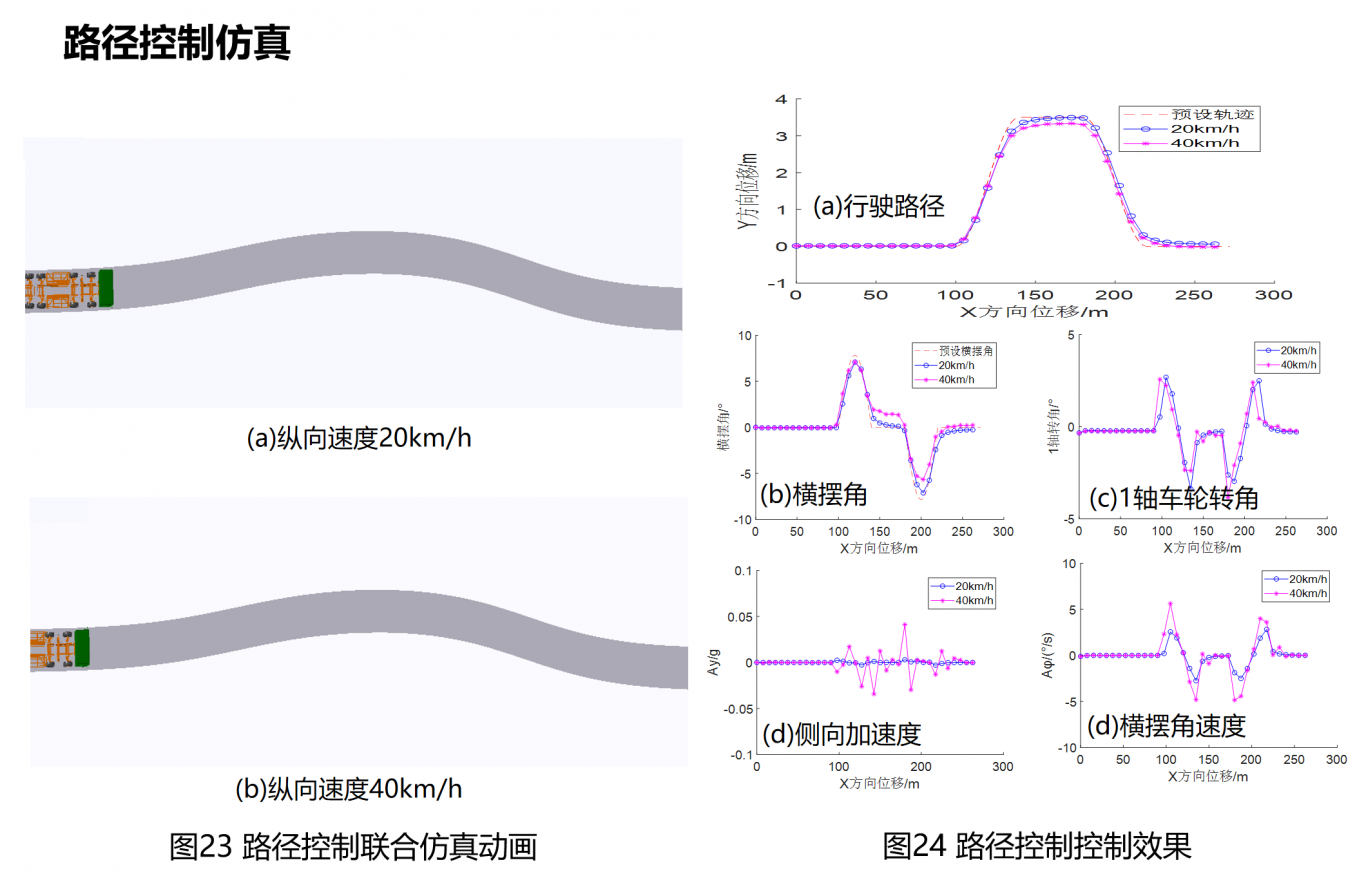
从重型车辆的动力学特点出发,设计了一种基于动态滑模控制的速度跟踪控制方法,推导了加速和减速的滑模控制律,证明了滑模控制律的渐进稳定,并使用了模糊逻辑实时调整滑模控制的增益系数,在实车上进行了速度跟踪控制试验,验证了速度跟踪控制方法的有效性。同时,针对重型车辆,设计了一种基于模型预测控制的路径跟踪控制方法,对车辆横向动力学模型进行了离散线性化,用其作为模型预测控制的预测模型,考虑车辆行驶条件,给出了约束边界,构造了优化目标函数,得到了路径跟踪控制的二次规划问题,基于LMS Motion和Maltab/Simulink联合仿真,仿真验证了所设计控制方法的有效性。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

博客网站
springboot、springcould开发框架并能熟练
-

汽车充电桩关键控制数据分析应用
软件通过多组录波文件,实时分析汽车充电桩充电过程中充电回路通
-

后台工单系统
该平台功能主要有小程序,工单系统,数据报表统计和导出,用户系
-

注销
注销注销注销注销注销注销注销注销注销注销注销注销注销注销注销
-

注销
注销注销注销注销注销注销注销注销注销注销注销注销注销注销注销
-

改装、预约洗车系统
项目架构:Servlet +Vue-cli+ Oracl
-

信息管理系统
该系统采用先进的技术架构,提供统一的数据交互的Web应用平台
-

荣智车辆综合管理系统
荣智车辆管理系统,利用电子设备(拍照识别系统),进行驾驶规范
-

PictureShow
图片展示和管理 展示地址:user.kevin-nav.
-

牲畜智能饮水系统
1. 利用 RFID 技术对过来饮水的牲畜进行身份识别,也可
-

QT桌面软件
QT桌面软件,用来根据excel表格中导入的数据根据公式画出
-

爬取喜马拉雅相关信息
使用scrapy框架作为基础,运用正则表达式进行匹配,采取手
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

