
案例介绍
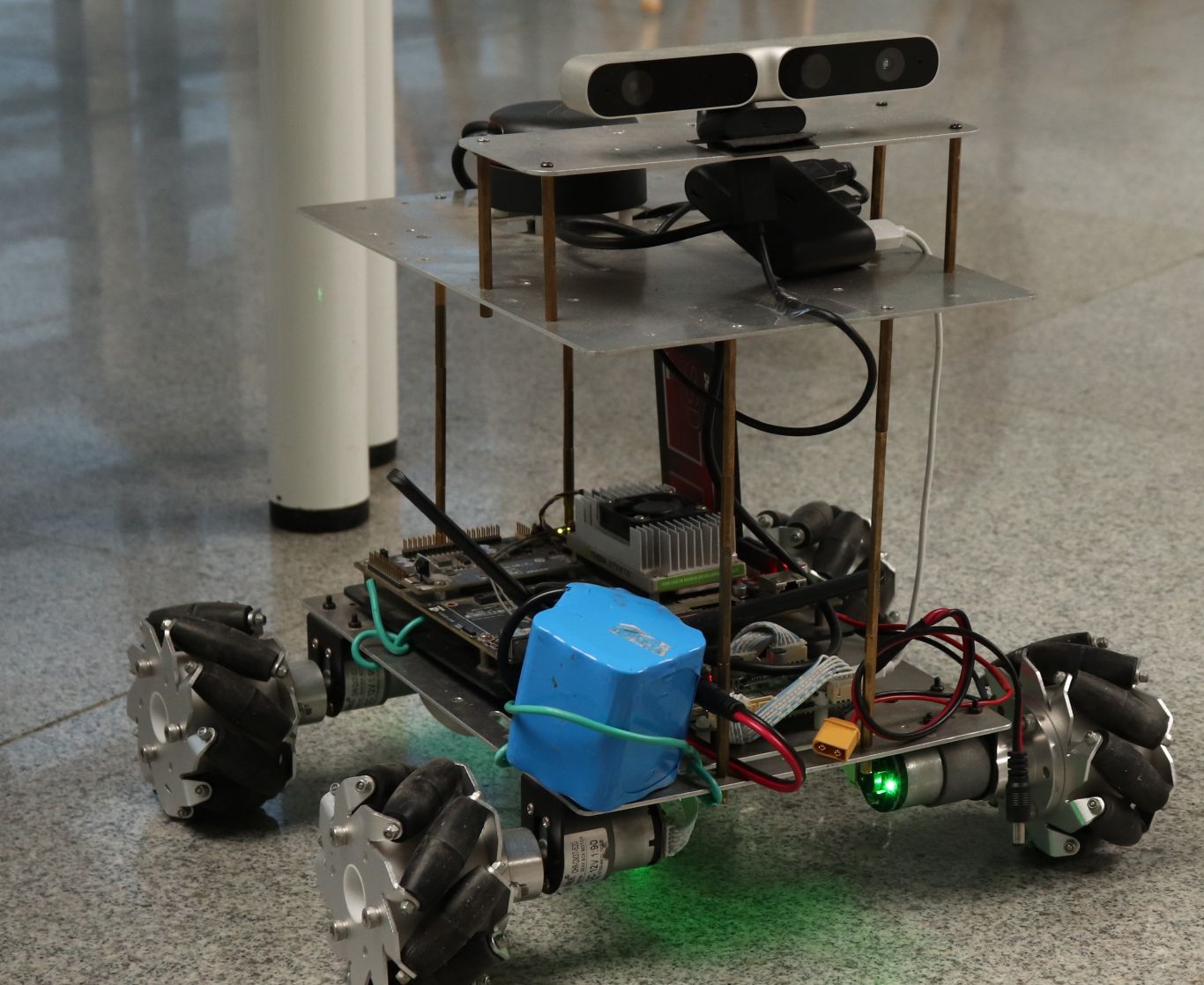
本项目主要研发实现具备人体姿态行为检测与工人安全帽佩戴检测的巡检机器人。该机 器人具备的功能有: 1、人体姿态行为检测:为了实现巡检机器人的人体姿态行为检测功能,本项目将充分 应用国内外机器学习和计算机视觉相关前沿理论成果,深入研究基于计算机视觉的人体骨骼 关键点检测、复杂场景人体动作识别、嵌入式平台实时异常行为检测识别等人体动作识别关 键技术,从而实现医院、校园、商场等场景中的跌倒、打闹、攀爬等异常行为的及时发现报 警。2、安全帽佩戴检测:利用图像智能识别技术,对施工现场的工人安全问题进行全方位 的智能管控。采用以人脸识别、着装规范、安全帽佩戴识别为代表的智能监管能力,实现了 “事前可预警,事后可追溯”。当检测到工作人员未佩戴安全服、安全帽时,自动触发告警, 提醒安全管理人员及时处理。 3、机器人定位与地图重建模块:为了实现机器人的巡检功能,机器人定位和地图重建 算法发挥着巨大的作用。本项目拟使用 Gampping-SLAM 进行同时定位与地图构建。它基于 RBPF 粒子滤波算法利用里程计与激光雷达数据进行即时定位与建图。Gmapping 算法在粒子 滤波算法基础上,使用自适应重采样的方法合理地分配粒子的权重,解决了原有算法粒子退 化问题。利用改算法,更好的实现了机器人构建地图功能。 4、自主导航与路径规划:为了实现巡检机器人巡检时的巡检功能,本项目拟使用全局 规划算法——A*算法来使巡检机器人能够沿着最优路径到达用户指定的地点。通过 A*算法 替换其自身的 Dijkstra 全局路径规划算法,加强了巡检机器人的的定位导航,自主避障能 力。在半结构化环境中,事先建立需要被巡检的环境地图,以路径最短为优化目标,采用栅 格地图来描述环境模型,用 A*方法进行路径规划,让机器能在在已建好的地图上快速地规 划出一条最优路径,并实时避通过自身携带的 IMU 和激光雷达生成实时的状态估计从而完成 自身的定位。在定位的同时增量式完成地图的构建,为下面的路径规划提供依据。根据以上 算法,使机器人自主导航更加精确
案例图片

相似案例推荐
其他人才的相似案例推荐
-

Delata并联机器人
采用Delta并联结构来抓取目标,通过深度学习以及改进的yo
-

某DSP设备驱动软件
行业特殊,所做项目为嵌入式,不便上传。 该设备的处理器为D
-

机器人离线编程软件
作品为针对机器人开发的数字化解决方案; 也称作机器人离线编程
-

车牌识别项目
基于yolov5的车牌检测,模型进行了一定改进,已训练好模型
-

AI算法模板部署
AI落地、部署、移植、算法SDK方向 具备工程落地的一些知
-

模型压缩
1.YOLOv5目标检测之模型压缩实战,yolov5、yol
-

深度学习算法研发
图像识别算法研发(安全帽佩戴识别,反光衣穿着识别,打手机识别
-

室内定位算法研发
电机声音异常 监测 算法 研发 ,漏水漏液监测 算法 研发
-

圈套棋-自主规划算法
我设计并实现了几种算法来参加Yinsh比赛。Yinsh是一种
-

智能厨师
该项目主要可以智能监控汉堡包制作过程的事实动态,根据动态过程
-

sass系统
智能语音 机器人客服后台 SaaS平台供应商将应用软件统一
-

智能仓库app
负责设计智能VMI仓库app, 解决保管员、出库员、叉车工的
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

